Navigation Of Mobile Robot With NAV2 And SLAM Using LIDAR
Abstract — This paper dives into the world of autonomous mobile robot navigation that achieves seamless integration between Robot Operating System (ROS2) and microcontroller-based systems without relying on standard ROS control packages. Unlike conventional methods that depend on dedicated ROS hardware integration packages, the system implements a traditional serial communication that enables direct interfacing with Arduino microcontrollers. Upon successful demonstration, real-time data handling and efficient buffer management on Arduino Mega was achieved by overcoming the memory limitations encountered with Arduino Uno. The implementation includes a custom joint state publisher that ensures precise synchronization between the physical robot and its simulated counterpart along with the deployment of the Robot Operating System (ROS2) and the Navigation Stack (Nav2) with Cartographer ROS, using their capabilities for precise environment mapping, navigation, and complex path planning in mobile robotics. Our system achieves accurate robot movement through careful calibration and real-world parameter measurements, incorporating detailed inertial calculations for improved motion control. This approach improves the precision of autonomous navigation and broadens the applicability of the robot in various scenarios, ranging from disaster management and indoor navigation to warehouse logistics.
You can read the full paper here.
Demo Video
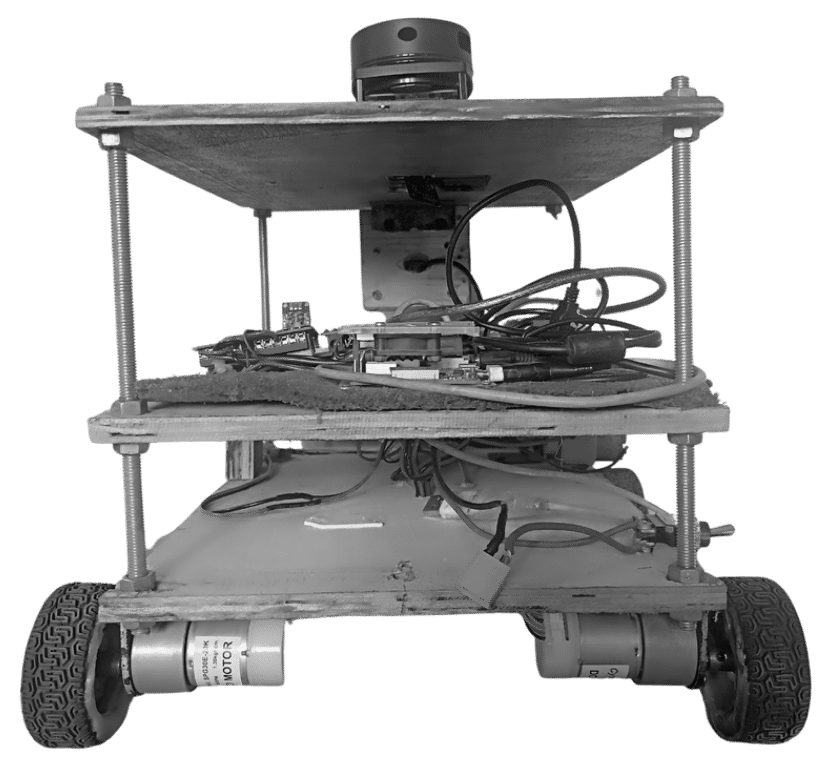
Gallery